单机时代2024年11月14日发布:Meta 公布机器人触觉感知能力研究成果:传感器理解操作外界物体
作者:Supitsha | 责任编辑:Admin
本次大会汇集了来自全球各地的科技领袖,共同探讨未来科技趋势...
【新澳资料最准的网站】 |
【新澳2024年正版资料】 |
| 【澳门三肖期期准免费大全】 |
| 【2024澳门六开彩免费精准大全】 |
| 【港澳图库app官网下载】 |
| 【2024新澳正版资料最新更新】 |
| 【2024年正版资料大全免费看】 |
| 【澳门正版挂牌免费挂牌大全】 |
| 【新奥六开彩资料2024】 |
| 【2024澳门天天彩免费正版资料】 |
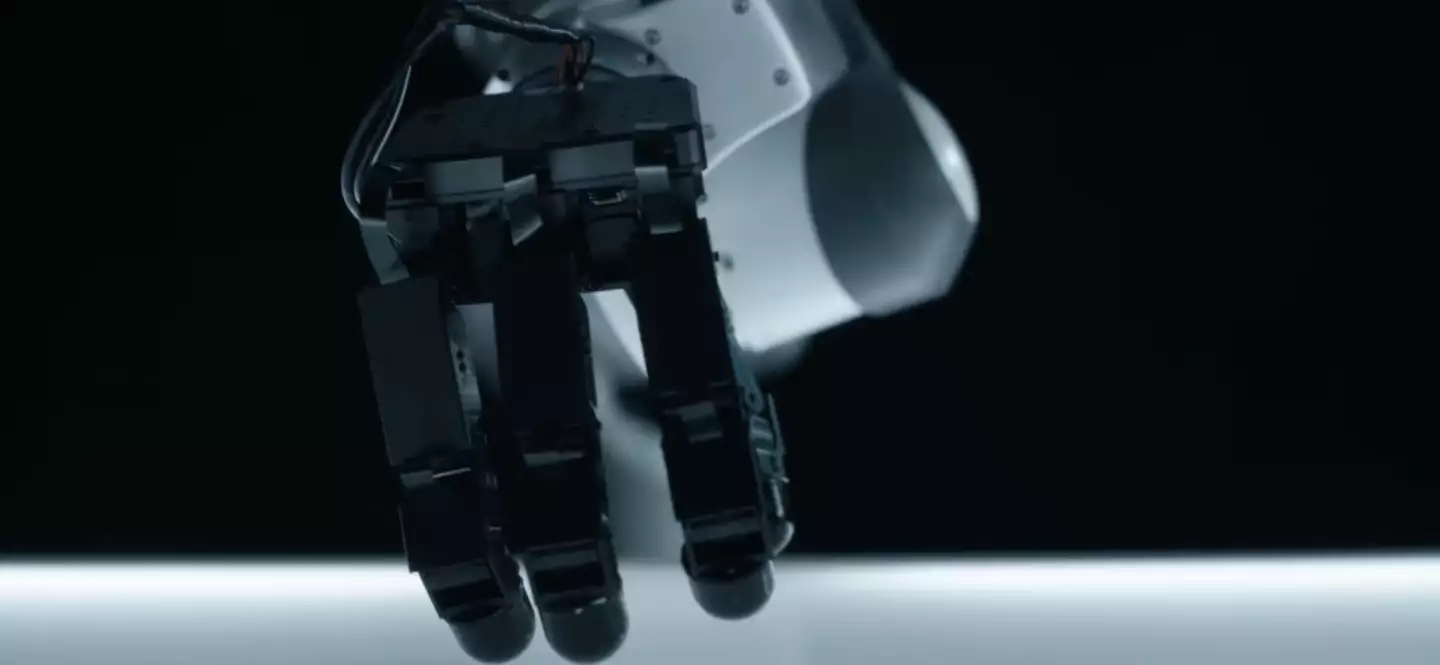
IT之家 11 月 4 日消息,Meta 发布新闻稿,介绍了旗下 FAIR(基础人工智能研究)团队对于机器人触觉感知能力的研究情况,这项研究旨在让机器人通过触觉方式进一步理解和操作外界物体。
Meta 表示,打造相应 AI 机器人的核心在于让机器人的传感器感知理解物理世界,同时利用“AI 大脑”精确控制机器人对物理世界进行反应,而团队目前开发的机器人触觉感知能力主要就是为了让机器人检测其交互的物体的材质与触感,以便于让 AI 判断机器人应当如何操作这些设备(例如拿起鸡蛋等场景)。
IT之家参考 Meta 公布的文献获悉,Meta 目前一共公布了 Meta Sparsh、Digit 360 和 Meta Digit Plexus 等多项研究成果,其中 Meta Sparsh 是一种基于 AI 的触觉编码器,主要利用 AI 的自我监督学习能力实现跨场景的触觉感知,让机器人的 AI 大脑在学习对于某种物体的“触感”后,即可在各种场景灵活“感知”相关物品的特性。
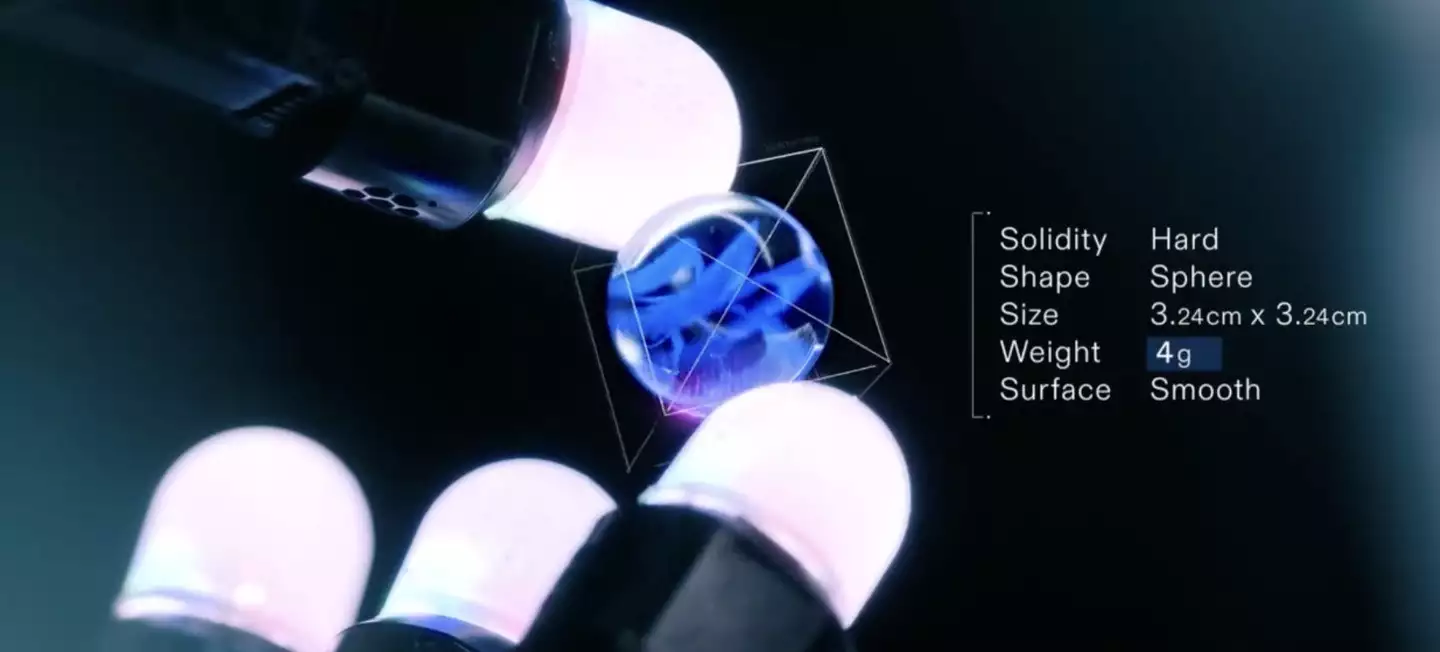
而 Digit 360 则是一种高精度传感器,该传感器主要部署在机器人手指上,号称具备多模态感知能力,能够捕捉细微的触觉变化。Meta 声称,该传感器可以模拟人类的触觉,支持振动、温度等多重感知能力。

Meta Digit Plexus 则是一个开放性的平台,号称能够整合多种传感器,使机器人能够更全面地通过传感器感知周围环境,并通过统一标准实时对接 AI 大脑进行反应。
此外, Meta 还开发了 PARTNR 基准,这是一项用于评估人机协作能力的测试框架,旨在测试机器人 AI 系统在实际生活场景中的计划和推理能力,该测试框架内置 10 万个自然语言任务,能够模拟居家环境中的各种情境,帮助开发者测试机器人对于自然语言的理解能力及执行能力。
Meta 现已对外公开这些技术和数据供研究者使用,包括论文、开源代码和模型等,鼓励更多研究社区参与触觉技术的创新研究,IT之家附相关项目地址如下(点此访问)。
| 【2024新澳正版挂牌之全扁】 | 【澳门码资料大全】 | 【2024年新澳精准资料免费提供网站】 | 【澳门一肖一码100准最准一肖_】 | 【澳门内部正版资料免费公开】 | 【澳门二四六天天资料大全2O23】 | 【2024新奥今晚开奖号码】 | 【二四六澳门免费全全大全】 |
推荐文章

合伙买彩票中奖后被判“有福同享”,法律给的公道原本是常识
▲ 图源 Meta (下同)IT之家参考 Meta 公布的文献获悉,Meta 目前一共公布了 Meta Sparsh、Digit 360 和 Meta Digit Plexus 等多项研究成果,其中 Meta Sparsh 是一种基于 AI 的触觉编码器,主要利用 AI 的自我监督学习能力实现跨场景的触觉感知,让机器人的 AI 大脑在学习对于某种物体的“触感”后,即可在各种场景灵活“感知”相关物品的特性。...

柿子红了秋天
此外, Meta 还开发了 PARTNR 基准,这是一项用于评估人机协作能力的测试框架,旨在测试机器人 AI 系统在实际生活场景中的计划和推理能力,该测试框架内置 10 万个自然语言任务,能够模拟居家环境中的各种情境,帮助开发者测试机器人对于自然语言的理解能力及执行能力。...

江西南昌举行马拉松大赛 35000名跑友激情开跑
Meta 声称,该传感器可以模拟人类的触觉,支持振动、温度等多重感知能力。...
你可以是个脆弱的强者:我终于看懂了麦家
Meta Digit Plexus 则是一个开放性的平台,号称能够整合多种传感器,使机器人能够更全面地通过传感器感知周围环境,并通过统一标准实时对接 AI 大脑进行反应。...
最新评论
查欢 2024-11-13 24:23
而 Digit 360 则是一种高精度传感器,该传感器主要部署在机器人手指上,号称具备多模态感知能力,能够捕捉细微的触觉变化。
IP:42.44.6.*
罗伯·考德瑞 2024-11-13 17:13
IT之家 11 月 4 日消息,Meta 发布新闻稿,介绍了旗下 FAIR(基础人工智能研究)团队对于机器人触觉感知能力的研究情况,这项研究旨在让机器人通过触觉方式进一步理解和操作外界物体。
IP:53.23.6.*
朱可名 2024-11-13 17:18
Meta 现已对外公开这些技术和数据供研究者使用,包括论文、开源代码和模型等,鼓励更多研究社区参与触觉技术的创新研究,IT之家附相关项目地址如下(点此访问)。
IP:47.14.2.*